





BOT-WTA20-322
Сварка горизонтальных и вертикальных швов на малых и средних резервуарах.
Подходит для цилиндрических вертикальных и горизонтальных резервуаров (емкостью до 5000 м³).
Автоматизирует кольцевые и продольные швы при производстве:
Нефтегазовых хранилищ
Водонапорных башен
Химических емкостей
2. Стыковая сварка корпусов судов (судостроение)
Соединение секций корпуса при сборке:
Борта/днища морских судов
Речные баржи
Спецсуда (например, нефтеналивные)
Решает проблему деформаций при "прихватке" крупногабаритных конструкций
BOT-WTA10-421
Сварка 3D-криволинейных швов на:
Днищах (заглушках) резервуаров
Сферических газгольдерах (шаровых емкостях)
Других сложных пространственных конструкциях
Техническое уточнение
Робот предназначен для автоматической сварки нелинейных соединений на поверхностях с:
Минимальным диаметром кривизны от 6000 мм
Любой пространственной ориентацией (горизонтальные, вертикальные, потолочные швы).

BOT-WTA20-122
Автоматизированная сварка криволинейных поверхностей диаметром от 800 мм
Основные объекты:
Крупногабаритные трубные конструкции
Спиральные и продольные швы на трубах Ø800+ мм
Переходные элементы (конусы, тройники)
Криволинейные металлоконструкции
Сегменты ветрогенераторов
Обтекатели авиационно-космического назначения
Архитектурные гнутые элементы (купола, арки)

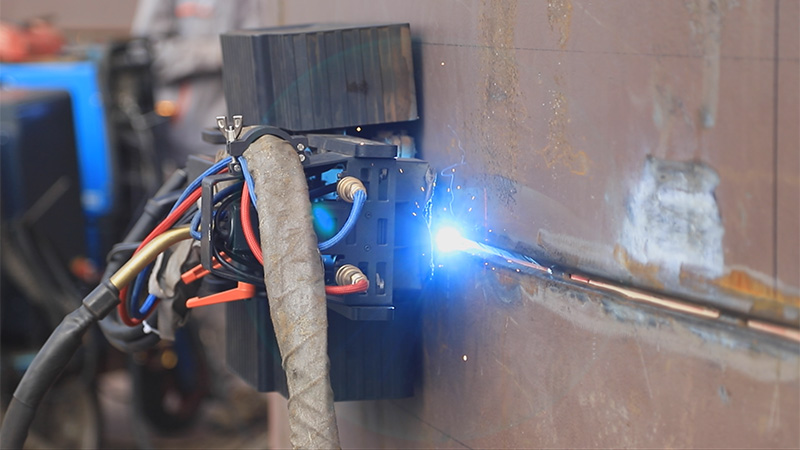
Камера на сварочной ванне
Максимальное расстояние наблюдения составляет 100м. Камера на ванне расплава используется для удаленного наблюдения за процессом сварки открытой дугой. Динамический диапазон составляет 140 + дБ, достигается благодаря передовой сенсорной технологии и точной конструкции электрической схемы. Пользователи могут наблюдать за процессом работы сварочной горелки, за сварочной проволокой и всем процессом сварки с помощью камеры, расположенной на расплавленной ванне.